Categorie: Meccanica Celeste
Tags: baricentro doppia ragnatela gravitazionale greci L4 L5 Punti Lagrangiani sistema rotante triangolo equilatero troiani
Scritto da: Vincenzo Zappalà
Commenti:0
Una doppia ragnatela. 2: L4 e L5, ovvero come scongiurare la guerra tra troiani e greci **
Per una trattazione completa dell’argomento affrontato in questo articolo, si consiglia di leggere il relativo approfondimento
Questo articolo è un piccolo capolavoro di logica ed eleganza (non certo per merito mio…). Vi invito a leggerlo senza paura. Esso presenta la determinazione dei punti lagrangiani L4 e L5, nel modo più generale possibile, seguendo la strategia illustrata nel 1999 da I. Vorobyov dell’Università di Vienna. Un metodo di una semplicità disarmante, che io ho solo cercato di arrangiare in modo veramente elementare (matematica e geometria delle scuole medie).
Come abbiamo già detto varie volte, i punti lagrangiani, da un punto di vista fisico, sono strettamente collegati alle superfici equipotenziali di due corpi rotanti, ossia la ormai famosa doppia ragnatela, di cui parleremo nell’ultima parte. Essi sono gli unici cinque punti di equilibrio del sistema rotante: un oggetto posto in uno di essi, mantiene una posizione fissa rispetto alle due masse predominanti. Il sistema di riferimento in cui definirli è, perciò, quello rotante. Le forze in gioco sono, di conseguenza, quelle attrattive delle masse e quella centrifuga.
I punti L1, L2 e L3 sono, in qualche modo, “facilitati” (QUI), dato che sono situati lungo la retta che unisce le due masse. Gli ultimi due, invece, si trovano ben distanti da questa linea e nemmeno Lagrange stesso avrebbe mai pensato che la sua soluzione matematica potesse avere una conferma fisica, data dai celebri asteroidi troiani e greci di Giove. Non solo i punti esistono e sono stabili, ma sono anche occupati fisicamente da corpi celesti in carne e ossa (ops… in terra e ghiaccio).
Prima di passare alla determinazione a cui si accennava prima, possiamo facilmente dimostrare che, effettivamente, la posizione ai vertici di un triangolo equilatero (in cui due vertici sono occupati dalle masse M1 e M2) soddisfa le condizioni richieste. Tuttavia, è una soluzione “di comodo”, perché non ci dice se possono esistere altri punti con le stesse caratteristiche.
Consideriamo la Fig. 1 in cui abbiamo disegnato due masse M1 e M2 e una piccola massa m posta proprio in modo da formare un triangolo equilatero con le altre due.
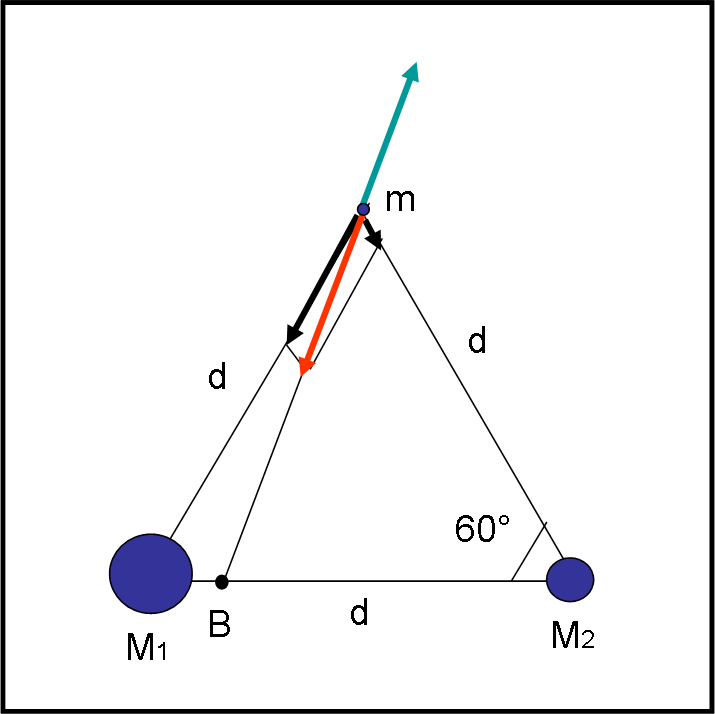
La massa m è attratta da entrambe e si trova alla stessa distanza da loro. Le forze agenti su di lei sono, perciò, direttamente proporzionali alle due masse M1 e M2. Ne segue che la composizione delle due forze è diretta verso il baricentro B. Dato che il sistema ruota attorno a B, la forza centrifuga che agisce sulla massa m controbilancia l’attrazione gravitazionale, assicurando la stabilità della posizione. Questa è però una dimostrazione “ a posteriori”. Inoltre, è ben chiaro che abbiamo considerato un sistema del tutto particolare, in cui il centro di massa stia sulla congiungente le due masse M1 e M2.
E se le tre masse fossero comparabili? In realtà, la soluzione visualizzata comunemente per i punti L4 e L5 si riferisce quasi sempre al caso di Giove e del Sole, in cui il baricentro è praticamente coincidente con quest’ultimo. Una figura ormai di uso comune… ma la configurazione può essere molto più generale ed è interessantissimo seguirne la trattazione, che è poi quella proposta e risolta dallo stesso Lagrange. Penso che anche i più esperti la troveranno illuminante e -forse- inaspettata.
Al di là dell’interesse matematico e fisico del risultato, seguiamola passo dopo passo per renderci conto di come si possano spiegare concetti anche difficili attraverso una serie di passaggi logici veramente elementari, a patto che vi sia dietro un cervello brillante. L’equazione “grande intelligenza = grande complessità” non è assolutamente obbligatoria (Feynman insegna). Come dicevo, il merito va tutto a Vorobyov e alla sua genialità: io ho solo cercato di semplificare e rendere ancora più immediata la trattazione, per renderla veramente godibile da TUTTI, amanti e non amanti della matematica.
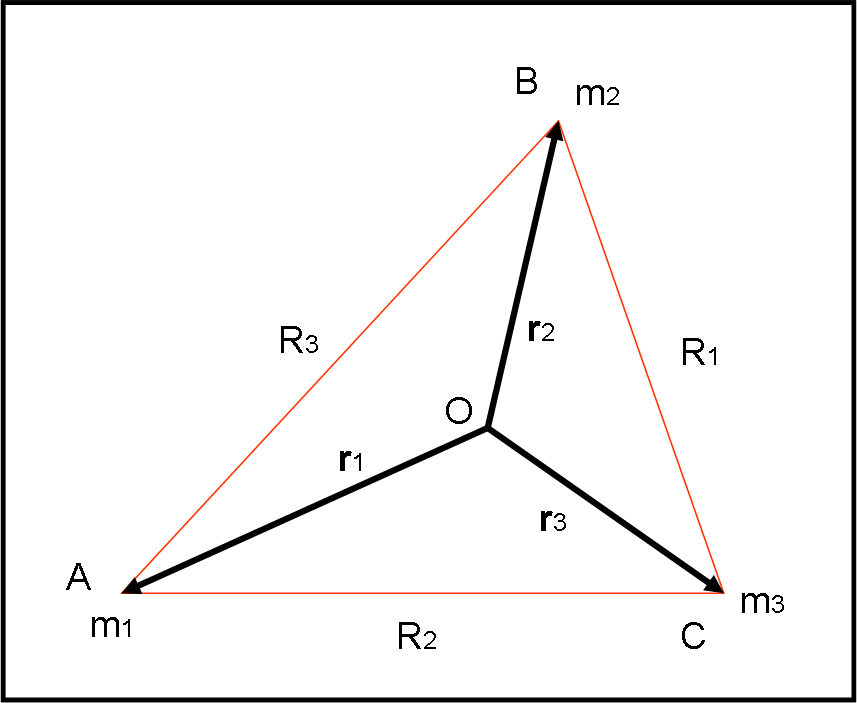
Consideriamo tre corpi di massa m1, m2 e m3 (la generalizzazione è massima) che NON stiano sulla stessa linea, ma che rivolvano con la stessa velocità angolare attorno a un certo punto O, su circonferenze ovviamente concentriche (il centro è lo stesso…). La situazione, mostrata in Fig. 2, simula perfettamente quella di un corpo “solido” che ruoti attorno a un asse, un corpo formato da un centro e da tre “barre” fisse che lo colleghino alle tre masse o, se preferite, un triangolo qualsiasi che giri attorno a un punto interno.
Ci chiediamo: “E’ possibile questa configurazione? E, se sì, sotto quali condizioni?”
Nel sistema rotante ciascuna massa mi deve rimanere in equilibrio. In poche parole, vogliamo che il triangolo non muti la sua forma durante la rotazione.
Ogni singolo corpo è soggetto alle forze attrattive degli altri due corpi. Esse sono date da:
F1 = F12 + F13
F2 = F23 + F21
F3 = F31 + F32
In parole povere, abbiamo solo detto che la forza attrattiva che subisce ogni massa mi è la somma delle forze attrattive che mj e mk esercitano su di lei (sono ovviamente somme vettoriali). Tutte queste forze Fij sono ovviamente dirette lungo i lati Rk corrispondenti,
Il modulo della generica forza vale (legge di gravitazione di Newton):
│Fij│= G mimj/Rk2 (modulo della generica forza Fij)
I tre corpi, però, devono anche ruotare con la stessa identica velocità angolare ω attorno a O. Sono perciò soggetti alle forze centrifughe FCi (dirette secondo OA, OB, e OC) date da (QUI):
FC1 = m1ω2r1
FC2 = m2ω2r2 …. (1)
FC3 = m3ω2r3
Ogni corpo deve essere in equilibrio nel sistema rotante, ossia la somma di tutte le forze agenti su di esso deve essere uguale a ZERO, ossia:
F1 + FC1 = 0
F2 + FC2 = 0
F3 + FC3= 0
O, ancora:
F12 + F13 + FC1 = 0
F23 + F21 + FC2 = 0
F32 + F31 + FC3 = 0
Sommando le tre equazioni, si ha:
F12 + F13 + F23 + F21 + F32 + F31 + FC1 + FC2 + FC3 = 0
Tuttavia, per il terzo principio della dinamica, si ha:
F12 = - F21
F13 = - F31
F23 = - F32
Abbiamo solo scritto che se mi agisce su mj con una certa forza gravitazionale, mj deve agire su mi con una forza uguale e contraria.
Semplificando si ha:
FC1 + FC2 + FC3 = 0
Ricordando le (1)
m1ω2r1 + m2ω2r2 + m3ω2r3 = 0
Dato che ω non può essere uguale a zero, possiamo scrivere:
m1r1 + m2r2 + m3r3 = 0 …. (2)
Ricordando la definizione di baricentro o centro di massa, rispetto a una certa origine O (QUI):
rB = Σ3i = 1 miri/M
si ha che se rB = 0, come dice la (2), il punto O deve essere il baricentro del sistema delle tre masse m1, m2 e m3.
In realtà, questo risultato non fa altro che confermare che, se in un sistema di corpi le uniche forze sono quelle che si esercitano tra di essi, il baricentro deve rimanere fisso. Ossia, il punto O, attorno a cui avviene la rivoluzione dei tre corpi, non può muoversi e quindi DEVE essere il baricentro del sistema.
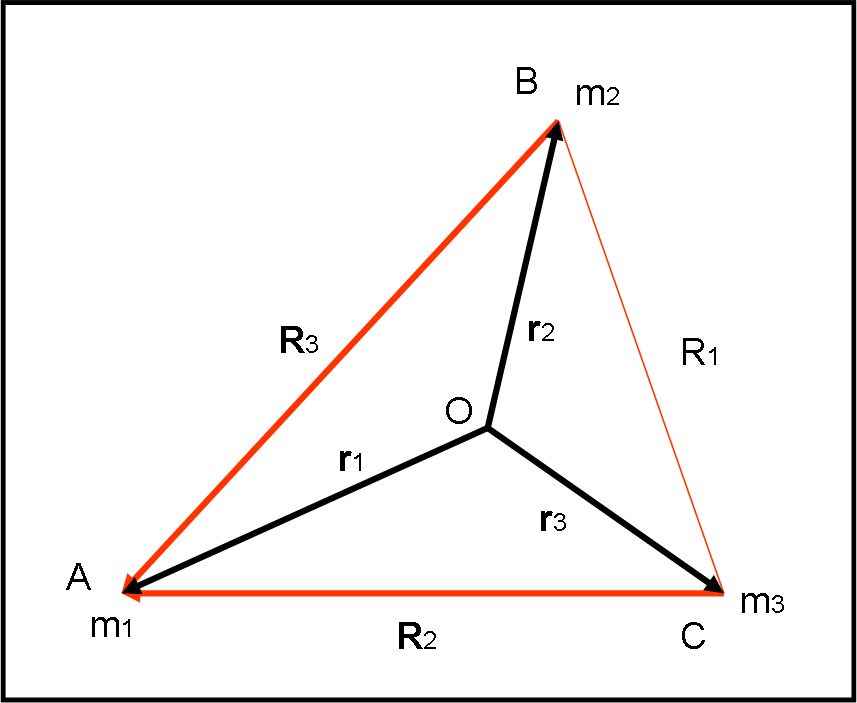
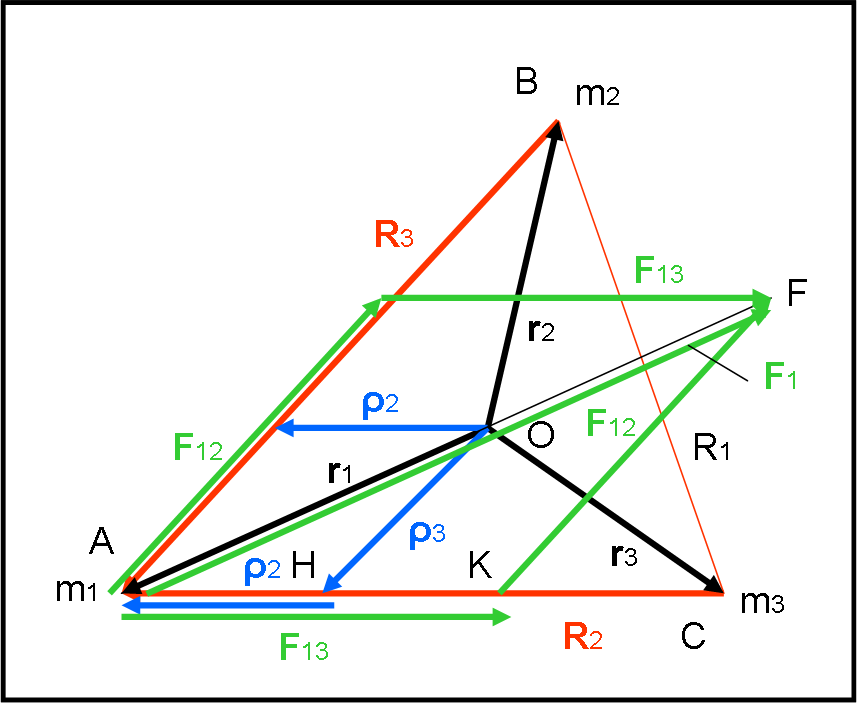
Appurato questo fatto importantissimo, possiamo passare alla seconda parte dell’articolo, dove traffichiamo un po’ con i vettori. La figura di riferimento è adesso la Fig. 3 che è uguale a quella precedente, tranne qualche piccola freccetta. Notiamo che i vettori R2 e R3 puntano entrambi verso m1
Sappiamo benissimo come sommare dei vettori, quindi non vi è nessun problema a scrivere:
r1 = r2 + R3
ma anche:
r1 = r3 + R2
Moltiplichiamo la prima equazione per m2, la seconda per m3 e poi le sommiamo :
m2r1 + m3r1 = m2r2 + m2R3 + m3r3 + m3R2 …. (3)
Dalla (2) abbiamo:
m2r2 + m3r3 = - m1r1
Sostituendo nella (3):
m2r1 + m3r1 = m2R3 + m3R2 - m1r1
m2r1 + m3r1 + m1r1= m2R3 + m3R2
r1(m1 + m2 + m3) = m2R3 + m3R2
Da cui si ricava:
r1 = (m2R3 + m3R2)/(m1 + m2 + m3)
Adesso, facciamo bene attenzione. Il vettore r1 è la somma di due vettori, ossia:
ρ2 = m3 R2/(m1 + m2 + m3)
e
ρ3 = m2 R3/(m1 + m2 + m3)
In modo compatto:
r1 = ρ2 + ρ3
Ragioniamo sopra questo semplice, ma fondamentale risultato.
Innanzitutto, si può affermare che ρ2 ha la stessa direzione di R2 così come ρ3 ha la stessa direzione di R3. I vettori differiscono, infatti, solo per il modulo. Inoltre, la somma vettoriale di ρ2 e ρ3 deve proprio essere r1. Ne segue che i due nuovi vettori possono essere indicati facilmente in blu nella Fig. 4.
Ora viene la parte più “astuta”.
Passiamo ai vettori delle forze gravitazionali agenti su m1. La forza F12 (relativa a m2) deve agire lungo il lato R3. La forza F13 (relativa a m3) deve agire lungo il lato R2. In altre parole, le due Forze sono parallele ai vettori ρ3 e ρ2. Disegniamo queste due forze, F12 e F13, in verde. Il modulo possiamo anche disegnarlo a caso (dipende dalle masse), ma è sicuramente vero che la risultante F1 delle due forze F12 e F13, deve essere diretta da m1 verso il baricentro (il moto avviene attorno a lui).
Consideriamo i triangoli AOH e AFK. Essi sono simili (i tre angoli sono uguali).
I loro lati, però, sono proprio i vettori forze F12 e F13 e i vettori ρ3 e ρ2. Ne segue che i loro moduli devono essere in proporzione:
F12/ρ3 = F13/ρ2
Scrivendoli per esteso:
Gm1m2/R32: m2R3/(m1 + m2 + m3) = Gm1m3/R22: m3 R2/(m1 + m2 + m3)
(Gm1m2/R32) (m3 R2/(m1 + m2 + m3)) = (Gm1m3/R22) (m2R3/(m1 + m2 + m3))
Gm1m2m3 R2/ R32 (m1 + m2 + m3) = Gm1m3 m2 R3/R22 (m1 + m2 + m3)
Semplificando:
R2/R32 = R3/R22
R23 = R33
Ossia:
R2 = R3
Se qualcuno vuole divertirsi, può rifare l’ultima parte di calcolo cambiando la massa di riferimento: invece di m1 si può considerare m2, con tutti i vettori relativi. Troverà, ovviamente, che:
R1 = R3.
Il triangolo ABC deve essere equilatero e O ne è il baricentro.
Alla domanda iniziale: “E’ possibile questa configurazione? E, se sì, sotto quali condizioni?”, possiamo rispondere senza esitazione: “Sì, la configurazione è possibile a patto che il centro di rotazione O sia il baricentro del sistema e che le tre masse occupino i vertici di un triangolo equilatero”.
Notiamo molto bene quanto la soluzione sia ben più generale di quella che viene comunemente riportata. Le tre masse sono qualsiasi e il triangolo ruota attorno al baricentro del sistema.
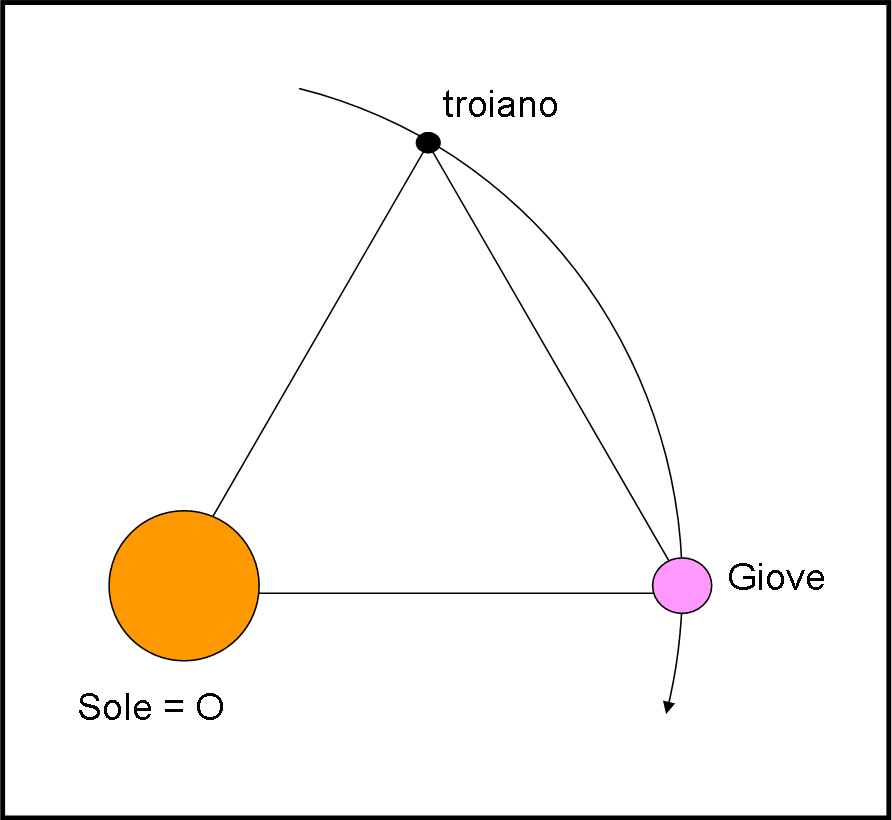
I troiani e i greci di Giove si trovano (quasi) esattamente nei pressi dei punti lagrangiani L4 e L5. In realtà, le loro orbite librano attorno a questi punti, in modo anche vistoso, ma il sistema complessivo mantiene la sua stabilità perfetta.
Questo classico esempio è, però estremamente, particolare. Il baricentro O coincide praticamente con il Sole e, di conseguenza, il pianeta e i due gruppi di asteroidi rivolvono attorno al Sole lungo la stessa orbita (Fig. 5).
Chissà che, prima o poi, non si trovi un sistema stellare triplo che rappresenti l’esempio più generale della geniale soluzione (particolare) di Lagrange, per il problema dei tre corpi…
Esistono anche altri metodi per determinare L4 e L5, soprattutto analitici. Essi sono estremamente “noiosi” e contorti. Ho preferito presentare solo quello vettoriale, molto più semplice e geniale.
La prossima volta ci occuperemo direttamente della doppia ragnatela gravitazionale e vedremo la faccenda da un punto di vista decisamente più fisico.




{kind=link}