Categorie: Fisica Fisica classica Meccanica Celeste
Tags: equazione di Eulero-Lagrange Lagrangiana punti di Lagrange
Scritto da: Fabrizio
Commenti:0
Fabricius e la pietra Lagrangiana - sesta parte
Nelle precedenti puntate abbiamo fatto conoscenza con alcuni esempi di lagrangiana e visto all'opera l'equazione di Eulero-Lagrange su uno di questi esempi.
Ora abbiamo tutti gli elementi per tornare al punto di partenza. La frase di Enzo nell'articolo sui punti lagrangiani che mi aveva inizialmente incuriosito: "Per calcolarne l'energia potenziale sarebbe più "fine" usare la Lagrangiana". Prima dovremo passare per un esempio di applicazione del metodo di Lagrange ad un sistema non inerziale che finora non abbiamo visto.
Lagrange sulla giostra: un riferimento non inerziale
Finora abbiamo visto il metodo di Lagrange in sistemi di riferimento inerziali, cioè fermi o in moto rettilineo uniforme. Ma il metodo di Lagrange si può applicare pari-pari anche quando si scelgono riferimenti non inerziali. Vediamo un caso semplice. Incontreremo una nostra vecchia conoscenza che ci inizierà a svelare qualcosa della frase di Enzo.
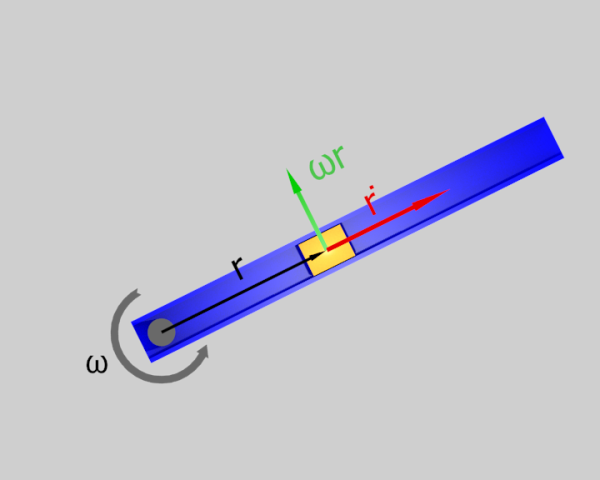 Abbiamo un binario orizzontale che ruota attorno ad un asse verticale con velocità angolare uniforme. Una giostra molto essenziale. Mettiamo sul binario un oggetto che scivola senza attrito, una saponetta. Vediamo cosa ci dice il metodo di Lagrange in questa situazione.
Abbiamo un binario orizzontale che ruota attorno ad un asse verticale con velocità angolare uniforme. Una giostra molto essenziale. Mettiamo sul binario un oggetto che scivola senza attrito, una saponetta. Vediamo cosa ci dice il metodo di Lagrange in questa situazione.
Applichiamo anche in questo caso il solito procedimento.
Scelgo le coordinate
Il vincolo costringe il movimento lungo la linea del binario, quindi basta una sola coordinata per definire il movimento. Come nei casi della slitta verrebbe naturale scegliere come coordinata proprio il binario con l'origine messa nel punto di incontro con l'asse di rotazione. Però c'è una differenza importante con i casi precedenti: qui il binario è in movimento, per di più ruota. Questo riferimento è un riferimento non inerziale. Bene, il metodo di Lagrange è applicabile senza modifiche anche in questo caso, richiede solo un po' più di attenzione nel trovare l'energia cinetica e potenziale. Dobbiamo sempre ragionare nel sistema di riferimento inerziale e poi esprimere le grandezze trovate con le coordinate scelte.
Esprimo l'energia cinetica K con la coordinata scelta
Il binario costringe l'oggetto a rimanere al suo interno, quindi il movimento sarà lungo la coordinata che abbiamo scelto. Se chiamiamo questa coordinata r, possiamo indicare la velocità in questo sistema di riferimento con . L'oggetto fa anche un altro movimento poiché segue il binario nella sua rotazione. La velocità di questo movimento è
come abbiamo visto per il pendolo. Qui però la variabile è r, mentre la velocità angolare ha un valore costante che chiamo ω,
. Bisogna comporre queste due velocità per ottenere la velocità totale. Fortunatamente le due velocità sono perpendicolari tra loro. Per ottenere il quadrato dell'ampiezza della velocità, che è quello che ci serve per l'energia cinetica, possiamo applicare il teorema di Pitagora.
L'energia cinetica è composta di due termini. Li coloro per seguirne meglio l'evoluzione.
Il primo termine ha una forma già vista, . Come nei casi precedenti contiene il quadrato della derivata della variabile rispetto al tempo,
. Questo termine è l'energia cinetica come appare nel riferimento non inerziale ruotante con il binario, possiamo chiamarlo energia cinetica apparente.
Il secondo termine, , non contiene come al solito la derivata della variabile, ma la variabile stessa al quadrato. Teniamolo d'occhio perché è un tipo sospetto.
Esprimo l'energia potenziale (U) nelle coordinate scelte
In questo caso non ci sono forze attive da considerare e quindi l'energia potenziale può essere considerata nulla.
In realtà ci sono la forza che fa ruotare il binario e la forza che il binario esercita sulla nostra saponetta. Ma, come al solito, le forze riguardanti il vincolo possono essere ignorate.
Altre forze non ce ne sono nel sistema di riferimento inerziale.
Inserisco K ed U nella espressione della lagrangiana
Qui c'è solo K.
Inserisco la lagrangiana nella equazione di Eulero-Lagrange
Sviluppo le derivate ed ottengo l'equazione differenziale che governa il moto
E qui avremmo risolto il problema. Questa è l'equazione differenziale da risolvere per trovare come si muove la nostra saponetta, cioè r(t). Peraltro è uno dei rari casi nei quali la soluzione può essere espressa in forma analitica.
Fermiamoci ancora un attimo sulla equazione ottenuta per esaminare i termini che la compongono.
Il termine a sinistra, , è la massa dell'oggetto moltiplicata per l'accelerazione lungo la coordinata r. Un osservatore nel sistema di riferimento ruotante, che vede la nostra saponetta accelerare, può considerare il termine a destra,
, come la forza che causa l'accelerazione. In effetti è una vecchia conoscenza, è la forza centrifuga che appare nei riferimenti non inerziali ruotanti.
Ma noi non avevamo messo forze nella lagrangiana.
Allora da dove è comparsa questa forza?
Seguendo la traccia rossa nelle equazioni viste sopra troviamo che viene da . Avevamo inserito l'argomento della derivata come una componente della energia cinetica nel riferimento inerziale. Questo stesso termine si comporta come una energia potenziale se visto dal riferimento non inerziale ruotante. L'energia potenziale prodotta dalla forza centrifuga. Nel riferimento ruotante potremmo pensare la lagrangiana come composta da una energia cinetica vista in questo riferimento,
, ed una energia potenziale (fittizia),
.
E' proprio una caratteristica della lagrangiana quella di aiutare a scoprire collegamenti inattesi tra grandezze fisiche come quello visto qui tra energia cinetica ed energia potenziale in diversi riferimenti.
Finalmente sono arrivato al problema che ha originato questo articolo.
La lagrangiana alle prese con i lagrangiani
Il sistema fisico è quella descritto in questo articolo dove c'è l'animazione che ci ricorda che il sistema è ruotante.
Abbiamo tre corpi che esercitano reciprocamente l'attrazione gravitazionale. Il problema consiste nel trovare una configurazione nella quale i tre corpi possano ruotare intorno al comune centro di massa mantenendo costanti le reciproche distanze, come se fossero un corpo rigido.
In un sistema di riferimento che ruota con i tre corpi sarebbero quindi fermi.
Il problema è semplificato da due approssimazioni:
- la massa del terzo corpo (m) è trascurabile rispetto a quella degli altri due
- i due corpi di massa maggiore (M1 e M2) sono in orbite circolari intorno al centro di massa.
Queste approssimazioni permettono di trattare il moto di M1 ed M2 come se m non ci fosse. Quindi il loro moto lo possiamo considerare un dato del problema invece di essere parte del problema. Per la terza legge di Keplero la velocità angolare ω è legata alla massa dei due corpi maggiori ed alla loro distanza dalla relazione
Allora possiamo applicare la solita procedura concentrandoci solo su m.
Scelgo le coordinate
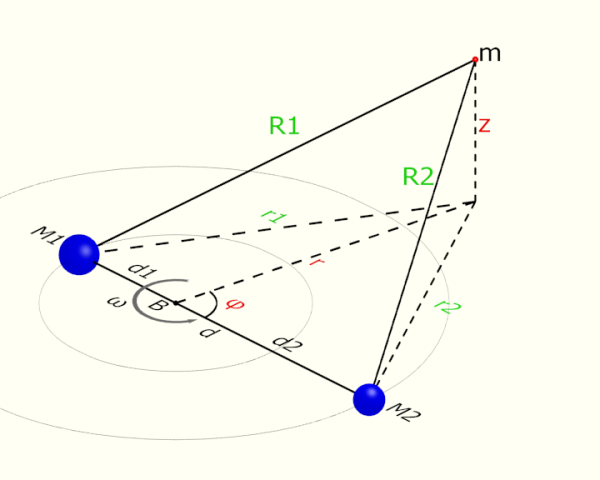
In questo problema m non è vincolato a seguire alcuna traiettoria. Si può muovere liberamente sul piano di rotazione di M1 e M2, ma anche uscire dal piano. Servono quindi 3 coordinate per descrivere il suo movimento. In questo caso scelgo di utilizzare le coordinate cilindriche. Le posizioniamo con l'asse z perpendicolare al piano di rotazione per sfruttare meglio le simmetrie della configurazione. Quindi la posizione di m è definita dalle 3 coordinate (r,φ,z) come si vede nella figura. Nella stessa figura ho evidenziato il verde le distanze che dipendono da queste coordinate, R1, R2, r1, r2.
Esprimo l'energia cinetica K con le coordinate scelte
I movimenti lungo le coordinate (r,φ,z) sono in ogni istante perpendicolari tra loro. Quindi possiamo applicare il teorema di Pitagora per ottenere il quadrato della velocità totale. L'unica avvertenza è che la velocità di rotazione si aggiunge a quella del riferimento, ω.
Esprimo l'energia potenziale (U) con le coordinate scelte
L'energia potenziale di m è dovuta alla contemporanea attrazione di M1 ed M2. I potenziali gravitazionali sono sommabili. Cioè l'energia potenziale di m è la somma di quelle prodotte da M1 ed M2. Questo ci permette di scrivere:
Al momento non conviene sostituire R1 ed R2 con le loro espressioni complete per non appesantire inutilmente la formula. Ricordiamo solo che sono funzioni delle coordinate.
Inserisco K ed U nella espressione della lagrangiana
Proviamo anche qui a prendere il punto di vista del sistema di riferimento ruotante separando l'energia cinetica apparente dal resto.
Nel temine più a destra, Ua, ho accorpato gli addendi che conosciamo fare parte dell'energia potenziale vista dal riferimento non inerziale, inclusa l'energia potenziale centrifuga vista nell'esempio precedente.
Credo che si riferisse a questo sviluppo la frase di Enzo "Per calcolarne l'energia potenziale sarebbe più "fine" usare la Lagrangiana" scritta nell'articolo sui punti lagrangiani .
In effetti l'abbiamo ottenuta dall'energia cinetica e l'energia potenziale gravitazionale nel riferimento inerziale e da queste è emerso il comportamento nel riferimento non inerziale solo riorganizzando la lagrangiana.
Vediamo anche gli altri termini. Quello più a sinistra è l'energia cinetica come appare nel riferimento ruotante.
C'è anche il termine al centro che non è bene collocabile. Sicuramente non fa parte dell'energia cinetica apparente, ma non sta bene neanche nell'energia potenziale, almeno per come la conosciamo, perché non dipende solo dalla posizione ma dipende anche dalla velocità. Ce lo dovevamo aspettare sapendo che ci sono altre forze apparenti oltre alla forza centrifuga. Forze apparenti che dipendono dalla velocità come la forza di Coriolis. In effetti quel termine è proprio il potenziale che genera la forza di Coriolis. Esce anche questa dalla lagrangiana. È un potenziale un po' diverso da quello gravitazionale o centrifugo. Lasciamolo separato da Ua.
Inserisco la lagrangiana nelle equazioni di Eulero-Lagrange
Trovata l'energia potenziale si potrebbe passare direttamente a trovare i punti di equilibrio ricordando che si trovano nei punti stazionari dell'energia potenziale.
Ma, per seguire fino in fondo il metodo di Lagrange, provo a farmi dire cosa fare dalle equazioni di Eulero-Lagrange. Chi volesse saltare lo sviluppo successivo che conferma le tre equazioni e traccia la loro risoluzione può continuare qui.
Questa volta le equazioni sono 3, una per ciascuna coordinata.
Partiamo con la coordinata z:
Ci interessano gli addendi che contengono o
, gli altri hanno derivata nulla.
questa è una delle 3 equazioni del moto.
In modo analogo si può arrivare alle altre due equazioni del moto.
Le tre equazioni sono complesse per la presenza dell'effetto di Coriolis, ultimo termine a destra, e per le espressioni delle accelerazioni nel sistema di riferimento utilizzato (termini a sinistra).
Ricordiamo però il nostro problema. Stiamo cercando i punti di equilibrio, cioè quei punti dove se mettiamo m questo ci dovrebbe rimanere. Per avvenire questo occorre che in quei punti le accelerazioni siano nulle quando la velocità sono nulle.
Quindi annulliamo velocità ed accelerazioni nelle tre equazioni sopra ed otteniamo:
Abbiamo ancora la conferma che il metodo di Lagrange permette di trovare le equazioni del moto solo con sviluppi matematici.
Risolvendo questo sistema di tre equazioni si ottengono i punti lagrangiani. Lo ha già fatto Enzo in dettaglio nel suo articolo.
Per chi volesse arrivarci dalle tre equazioni viste sopra, la traccia che ho seguito è questa.
Dalla prima equazione si ottiene che le soluzioni sono sul piano z=0, cioè sul piano di rotazione di M1 ed M2.
Dei 3 addendi di Ua, il primo non dipende da z. Rimangono quindi solo il 2° ed il 3° .
, con
e
Facendo le derivate si ottiene che ha come unica soluzione reale
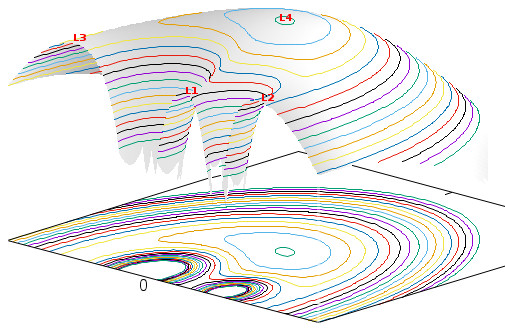 Sul piano z=0, Ua si presenta con un andamento simile a quello in questa figura. I punti lagrangiani sono sulle cime delle colline e nelle selle. Per trovarne la posizione occorre ricorrere alle altre due equazioni.
Sul piano z=0, Ua si presenta con un andamento simile a quello in questa figura. I punti lagrangiani sono sulle cime delle colline e nelle selle. Per trovarne la posizione occorre ricorrere alle altre due equazioni.
Dalla seconda equazione si ricava che le soluzioni sono su due rete. Una è la retta che passa per M1 ed M2 (φ=0 e φ=π). L'altra è la retta equidistante da M1 ed M2 . Che equivale a dire che le distanze r1 ed r2 della figura precedente devono essere uguali.
La terza equazione permette di identificare i punti di equilibrio su queste due rette.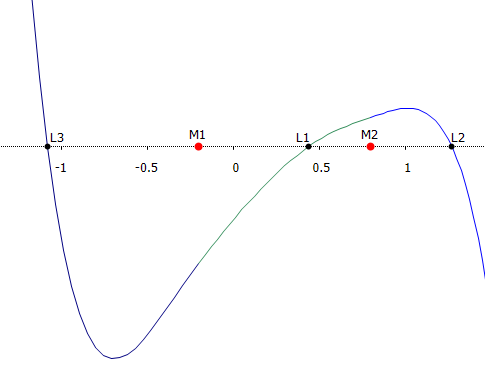
Inserendo la condizione della prima retta (φ=0 e φ=π) si ottiene una equazione risolvibile solo numericamente. Il grafico è del tipo di quello affianco. Le intersezioni del grafico con l'asse x sono le coordinate dei punti lagrangiani L1, L2 e L3.
Un avviso per chi volesse effettuare i passaggi per arrivare a questa equazione. In realtà ho dovuto considerare 3 equazioni a causa delle combinazioni di segni necessarie per convertire il modulo delle distanze di m da M1 ed M2 in una forma gestibile algebricamente.
Inserendo la condizione della seconda retta si ottiene che
. Detto in modo più interessante, M1, M2 ed m devono essere ai vertici di un triangolo equilatero.
Ci sono due punti con questa caratteristica denominati L4 ed L5.
Al termine di questo sviluppo, mi fermo ancora un attimo sulla seconda e terza equazionie per darne una interpretazione fisica. 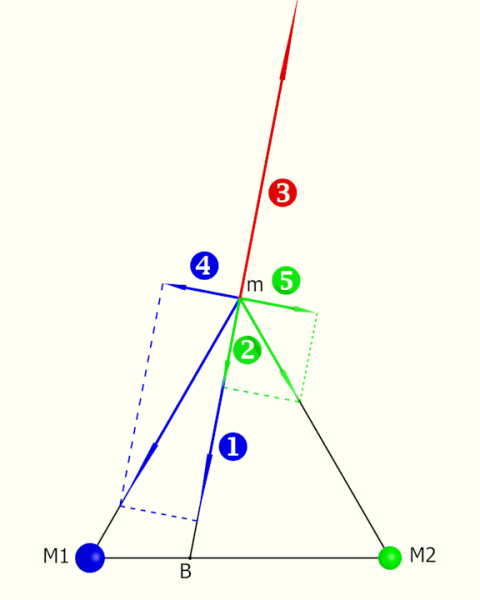 Le scrivo nella forma che già ingloba la condizione di essere sul piano z=0 trovata nello sviluppo visto sopra.
Le scrivo nella forma che già ingloba la condizione di essere sul piano z=0 trovata nello sviluppo visto sopra.
Ricordiamo che la derivata dell'energia potenziale lungo una direzione è l'opposto della forza lungo quella direzione.

La prima dice che la somma delle componenti radiali dell'attrazione dei due corpi maggiori su m, (1) e (2), deve uguagliare la forza centrifuga, (3). La seconda ci dice che le componenti tangenziali della forze di attrazione, (4) e (5), devono annullarsi. Questo è spesso il punto di partenza del ragionamento per la ricerca dei punti lagrangiani. Con il metodo di Lagrange queste condizioni emergono come risultato dal solito sviluppo della lagrangiana senza alcun ragionamento fisico o geometrico aggiuntivo.
Ho evidenziato questa caratteristica del metodo di Lagrange perché era proprio lo scopo che Lagrange si era prefisso. Ricordate? L'ho già citato più volte. Quello che abbiamo visto può essere un ulteriore esempio. Abbiamo applicato il metodo. Nelle soluzioni abbiamo trovato inglobata la forza centrifuga e la disposizione delle forze di gravità che agiscono su m nei punti di equilibrio. Non è stato necessario che mettessimo noi queste grandezze fisiche e configurazioni geometriche nel nostro ragionamento.
A questo punto ringrazio chi mi ha accompagnato fin qui. Questi esempi hanno cercato di dare un'idea di cosa sia la lagrangiana e di come possa essere utilizza. In realtà abbiamo visto solo un lato della medaglia. Ce n'è anche un altro nel quale la lagrangiana svela un aspetto della natura che può sembrare preveggenza, quello che Maupertuis interpretò come un intervento sopranaturale. Chissà, potrebbe essere il sequel di "Fabricius e la pietra lagrangiana".
La serie completa degli articoli sulla Lagrangiana la trovate QUI




{kind=link}