Categorie: Fisica classica
Tags: centro di massa coefficiente di restituzione energia cinetica quantità di moto quiz soluzione urti
Scritto da: Vincenzo Zappalà
Commenti:5
Soluzione del quiz sul canguro papalliano (prima parte) e gli urti anelastici ***
Per una trattazione accurata degli urti elastici potete andare QUI (effetto Compton), ma ritroveremo le stesse formule partendo dagli urti anelastici in genere.
Ciò che caratterizza i vari tipi di urto è la legge di conservazione dell’energia cinetica. Essa rimane valida solo nel caso di un urto completamente elastico. Non vi è conservazione in tutti gli altri casi di urto, in quanto una certa quantità di energia cinetica viene trasformata nell’urto in altre forme di energia (rumore, calore, deformazione, …). La dinamica relativistica, appena terminata, ci ha mostrato come si comporti l’energia totale e come si conservi sempre.
Il valore massimo di energia assorbita si ha quando l’urto è completamente anelastico. In questo caso si ha anche come risultato l’unione delle due particelle in gioco che possono proseguire insieme con una certa velocità. Se le due particelle si separano dopo l’urto (muovendosi ognuna con una certa velocità) abbiamo i vari casi di urto anelastico.
Dato che la differenza tra i vari tipi di urto si ottiene attraverso l’energia cinetica, si definisce un coefficiente di restituzione e, tale che:
ECD = e2ECP
Dove e può variare tra 0 e 1. Nel caso valga 0, siamo nel caso dell’urto completamente anelastico, mentre, se vale 1, siamo nel campo degli urti elastici.
In TUTTI i casi, comunque, deve valere la conservazione della quantità di moto. Ossia quella prima dell’urto deve essere uguale a quella dopo l’urto.
Un commento importante prima di iniziare. Niente ci vieta di considerare una delle due particelle ferma prima dell’urto. Tuttavia, non è assolutamente possibile considerare la particella IMMOBILE, dopo l’urto. Facendo questo, introdurremmo una forza esterna (un vincolo) che obbligherebbe la particella a non subire spostamenti. Ne seguirebbe che la conservazione della quantità di moto non sarebbe più verificata!
Normalmente, per descrivere un urto si utilizza un sistema di riferimento inerziale qualsiasi. Ciò, però, comporta una conservazione della quantità di moto del tipo:
m1v1P + m2v2P = m1v1D + m2v2D
dove i pedici P e D si riferiscono a prima e dopo l’urto.
La faccenda non dà grossi problemi, trattando urti completamente elastici e anelastici (come abbiamo visto quando li abbiamo descritti), ma può complicare le cose quando si descrivono urti anelastici in genere, dove compare il coefficiente e.
Conviene, allora, cambiare sistema di riferimento e trattare l’urto anelastico generico in un sistema di riferimento solidale con il baricentro (o centro di massa) del sistema delle due particelle. Per far ciò dobbiamo riferire le velocità delle due particelle in gioco al loro centro di massa. Ovviamente, il centro di massa si muove con una certa velocità, dato che cambia da istante a istante la configurazione del sistema.
Il grande vantaggio di questa scelta è quella di avere la quantità di moto totale prima e dopo l’urto sempre uguale a ZERO (come dimostreremo tra poco).
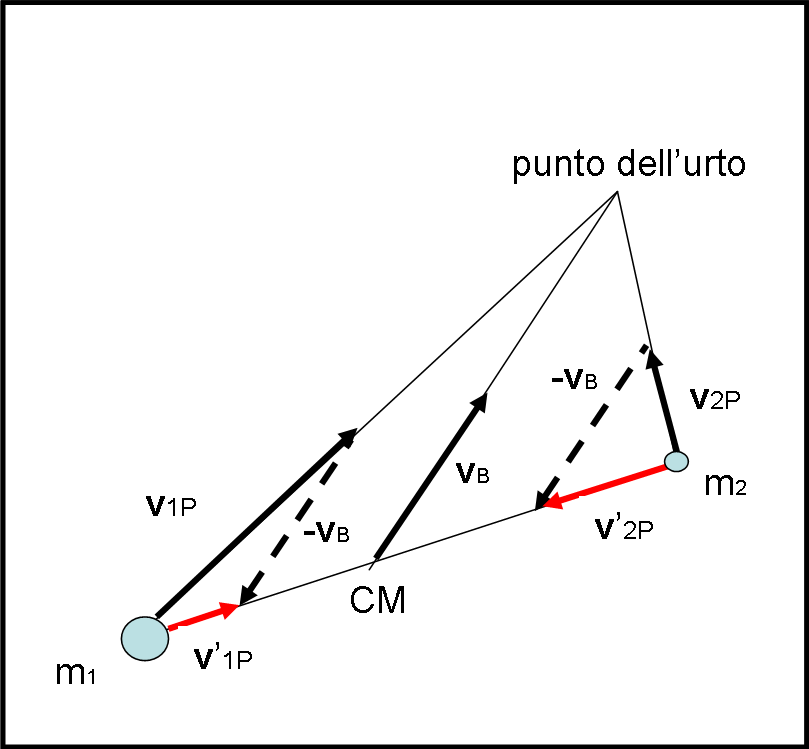
Per riferire le velocità al centro di massa, basta eseguire le seguenti operazioni vettoriali:
v’1P = v1P - vB
v’2P = v2P - vB
v’1P e v’2P sono le velocità delle due particelle prima dell’urto, riferite al sistema del centro di massa, mentre v1P e v2P sono quelle del sistema inerziale esterno. La Fig. 1 mostra graficamente la situazione in un urto bidimensionale qualsiasi.
Dimostriamo che la quantità di moto totale prima dell’urto risulta uguale a ZERO.
q’P= m1v’1P + m2v’2P = m1v1P - m1vB + m2v2P - m2vB = m1v1P + m2v2P - (m1 + m2)vB
Tuttavia, la velocità del centro di massa può scriversi (ricordando la definizione di centro di massa e derivando):
vB = (m1v1P + m2v2P)/(m1 + m2)
Sostituendo nella relazione precedente si ottiene:
q’P = m1v1P + m2v2P - (m1 + m2)vB = m1v1P + m2v2P - (m1 + m2)(m1v1P + m2v2P)/(m1 + m2)
Semplificando (m1 + m2), si ha:
q’P = m1v’1P + m2v’2P = m1v1P + m2v2P - m1v1P - m2v2P = 0
Analogamente, deve anche essere
q’D = m1v’1D + m2v’2D = 0
O, anche:
m1v’1P = - m2v’2P …. (1)
m1v’1D = - m2v’2D …. (2)
In poche parole, un osservatore piazzato sul centro di massa vede le due masse muoversi verso di lui con quantità di moto uguali e contrarie. La stessa cosa capita dopo l’urto, ma con versi opposti.
Utilizzando queste nuove coordinate si possono ricavare abbastanza facilmente le velocità dopo un urto anelastico. Vedremo che, con e = 1, si ricade nel caso dell’urto elastico che, in un sistema inerziale esterno, avevamo già trattato QUI (effetto Compton) e, con e = 0, nel caso di un urto perfettamente anelastico (vedi dinamica relativistica).
Infine, studieremo il caso in cui la massa di una particella tende a essere infinita e la sua velocità iniziale può essere considerata ZERO.
Urto anelastico
In questo caso non si conserva l’energia cinetica. Le relazioni da considerare sono:
m1v’1P = - m2v’2P …. (3) quantità di moto prima dell’urto
m1v’1D = - m2v’2D …. (4) quantità di moto dopo l’urto
e2(½ m1v’21P + ½ m2v’22P) = ½ m1v’21D + ½ m2v’2D2 …. (5) energia cinetica
Possiamo tranquillamente riferirci a un caso unidimensionale e usare solo i moduli dei vettori.
Le incognite sono, ovviamente, le velocità delle due masse dopo l’urto, v1D’ e v2D’.
Dalla (5) si ricava:
m1(e2v’21P - v’21D) = m2(v’22D - e2v’2P2)
ricordando i prodotti notevoli (QUI) si ha:
(a2 – b2) = (a – b)(a + b)
E quindi:
m1(ev’1P - v’1D)(ev’1P + v’1D) = m2(v’2D - ev’2P)(v’2D + ev’2P) …. (6)
Moltiplichiamo ambo i membri della (3) per e
m1ev’1P = - m2ev’2P
e le sottraiamo, membro a membro, la (4)
m1ev’1P - m1v’1D = - m2ev’2P+ m2v’2D
m1(ev’1P - v’1D) = m2(v’2D - ev’2P) …. (7)
Dividiamo adesso, membro a membro, la (6) e la (7). Possiamo farlo dato che sono due uguaglianze…
ev’1P + v’1D = v’2D + ev’2P …. (8)
Le (3) e (4) ci dicono anche che:
m1v’1P = - m2v’2P
v’2P = - (m1/m2) v’1P …. (9)
m1v’1D = - m2v’2D
v’2D = - (m1/m2) v’1D …. (10)
Andiamo a sostituire la (9) e la (10) nella (8)
ev’1P + v’1D = - (m1/m2) v’1D - e(m1/m2) v’1P
Siamo riusciti ad avere una relazione con una sola incognita (v’1D).
Ricaviamola:
v’1D + (m1/m2) v1D’ = - ev1P’- e(m1/m2) v’1P
v’1D (1 + m1/m2) = - ev’1P (1 + m1/m2)
v’1D = - ev’1P …. (11)
Attenzione: potremmo anche fermarci qui, pensando al nostro quiz. Tuttavia, siamo ancora nel sistema del centro di massa, mentre noi vogliamo riferirci a Papalla.
Riprendiamo la (8)
ev’1P + v’1D = v’2D + ev’2P
e usiamo la (11):
ev’1P - ev’1P = v’2D + ev’2P
0 = v’2D + ev’2P
E, quindi:
v’2D = - ev’2P …. (12)
Le (11) e (12) risolvono il problema e ci dicono che nel sistema di riferimento del centro di massa le quantità di moto delle due particelle dopo l’urto sono le stesse di quelle prima dell’urto, moltiplicate per e e cambiate di verso:
m1v’1D = - m1ev’1P …. (13)
m2v’2D = - m2ev’2P …. (14)
le (11) e (12) possono essere riportate al sistema inerziale esterno, ad esempio Papalla, ricordando le relazioni che legano le velocità delle particelle e del centro di massa:
Potete provare a farlo voi e alla fine troverete le due relazioni generali (la soluzione viene data in fondo all’articolo):
v1D = ((m1 - em2)v1P + (1+ e) m2v2P)/(m1 + m2) …. (15)
v2D = ((1 + e)m1v1P + (m2 - em1)v2P)/(m1 + m2) …. (16)
Nel caso in cui e = 1, si ottiene:
v1D = ((m1 - m2)v1P + 2m2v2P)/(m1 + m2)
v2D = ((2m1v1P + (m2 - m1)v2P)/(m1 + m2)
Proprio le relazioni che avevamo ricavato QUI (formule (5) e (6))
Nel caso in cui e = 0, dobbiamo tener conto che la velocità finale vD è unica (le due masse si uniscono) ed essa si ricava sia dalla (15) che dalla (16)
vD = (m1v1P + m2v2P)/(m1 + m2)
In altre parole, la velocità finale è uguale alla velocità del centro di massa prima dell’urto.
Torniamo alla (15) e consideriamo la velocità iniziale della seconda particella (v2P) uguale a ZERO
v1D = (m1 - em2)v1P /(m1 + m2)
Dividendo numeratore e denominatore per m2, abbiamo:
v1D = ((m1/m2) - e)v1P /((m1/m2) + 1) …. (17)
Se la massa m2 tende a infinito, la (17) si risolve passando al limite:
v1D = lim m2 →∞ ((m1/m2) - e)v1P /((m1/m2) + 1) = - ev1P
Il caso proposto dal nostro quiz può quindi assumere con sufficiente accuratezza che il papallo rimbalzi con una velocità che è praticamente uguale a quella precedente moltiplicata per e (e cambiata di segno).
La faccenda sarebbe leggermente più complicata, dato che la velocità v2D non può essere ZERO poiché questo fatto comporterebbe la non conservazione della quantità di moto. Essa tende a zero per m2 che tende a infinito, ma non può essere veramente zero. In realtà, si ha quindi, un leggero allontanamento del riferimento Papalla finale, rispetto al sistema Papalla iniziale. Tuttavia, vale anche la legge di gravità e Papalla viene attirata verso il papallo che ricade, riassumendo la posizione precedente, usata come riferimento fermo, e così via… Insomma, l’approssimazione è più che valida e la possiamo usare tranquillamente.
Soluzione del passaggio da sistema del baricentro a sistema esterno
Abbiamo:
v1D = v’1D + vB
Ma anche:
v’1D = - ev’1P
E quindi:
v1D = - ev’1P + vB …. (18)
Tuttavia, abbiamo anche che:
v1P = v’1P + vB
Ossia:
v’1P = - (vB - v1P)
Sostituendo questo valore nella (18) si ottiene:
v1D = - ev’1P + vB = - ev1P + evB + vB = - ev1P + (1 + e)vB
Ricordando l’espressione della velocità del centro di massa, si ha:
v1D = - ev1P + (1 + e)(m1v1P + m2v2P)/(m1 + m2)
v1D = (- em1v1P - em2v1P+ m1v1P + em1v1P + m2v2P + em2v2P)/(m1 + m2)
v1D = (- em2v1P + m1v1P + m2v2P + em2v2P)/(m1 + m2)
v1D = ((m1 - em2)v1P + (1 + e)m2v2P)/(m1 + m2)
che è esattamente la (15).
In modo del tutto analogo si ricava la (16) (se proprio non ne avete abbastanza, potete facilmente ricavarla…).
QUI trovate il testo del quiz
QUI trovate la seconda parte della soluzione




5 commenti
Caro Enzo... ahi ahi l'avevo fatta troppo facile....
Ti dirò che mi piacerebbe molto un tuo articolo sul centro di massa, su come si definisce e determina... in rete si trovano cose molto confuse ed io ho usato una formula che mi piacerebbe ricavare (comunque ci sto pensando)
R= (r1m1 + r2m2 +r3m3 ...+rn mn)/ m1 +m2 +m3..+mn
che ho derivato rispetto al tempo ottenendo VB (considerando il suo avvicinamento verso il punto dell'urto)
VB= (V1p m1 +V2p m2)/(m1 +m2).
Per ricavare la (16) ho usato lo stesso metodo da te descritto.
Innanzitutto, come prima, deve valere la relazione: v2D = v’2D + vB
Così come, dalla relazione (12) si ha, che : v’2D = - v’2P e
v2D = - v’2P e + vB
Infine dato che v2P = v’2P + vB
v’2P = (v2P - vB)
v2D = -(v2P - vB) e + vB
v2D = -e v2P + e vB + vB
v2D = -e v2P + vB (1 + e)
Ma VB= (m1v1P + m2vP)/(m1 + m2)
v2D = - ev2P + (m1v1P + m2v2P)(e +1)/(m1 + m2)
v2D = (-ev2P (m1 + m2) + (m1v1P + m2v2P +m1ev1P + m2ev2P))/(m1 + m2)
v2D = (-ev2P m1 -ev2P m2 + m1v1P + m2v2P +m1v1Pe + m2v2Pe))/(m1 + m2)
v2D = (- ev2Pm1 + m1v1P + m2v2P +m1ev1P)/(m1 + m2)
v2D = v2P (-em1 +m2) + v1P m1 (1+ e)/(m1 + m2)
v2D = v1P m1 (1+ e ) + v2P (m2 - em1) /(m1 + m2)
Che è proprio la (16).
Paolo
caro Paolo,
perfetto...
In realtà, bastava approssimare e via... ma mi è sembrato doveroso descrivere l'intera trattazione per capire meglio gli urti di qualsiasi tipo...
Ovviamente, la seconda parte era molto più semplice, almeno per voi "esperti".
Accolgo con piacere il tuo invito sul centro di massa.
Anzi, vorrei anche ricavare i punti lagrangiani 4 e 5 (non è cosa banalissima) e poi un'altra cosa che penso ti faccia piacere: ricavare tutte e tre le leggi di Keplero dalla legge di Newton. Purtroppo, c'è solo un piccolo-grande intoppo nella risoluzione di una equazione differenziale di secondo grado che necessita l'utilizzo dei numeri immaginari. Ho deciso di dare per buono un solo passaggio (magari rimandando a un sito professionale per la soluzione) e derivare tutto il resto. Se mi ricordo bene, è una cosa che mi avevi chiesto tempo fa...
La RG può aspettare un po', direi, e vorrei dedicarmi a problemi di questo tipo.
Certo che la matematica non mancherà, ma ormai se vogliamo rendere quantitativi i risultati ne siamo obbligati! Ci penso sopra e poi descriverò il programmino che ho in testa...
Ricordi benissimo

Paolo
Caro Enzo, ormai lo sai che sono testardo e non mi piace usare formule senza averne compreso il significato, per cui ragionandoci ho provato a ricavare la formuletta per determinare le coordinate del centro di massa:
R= (r1m1 + r2m2 +r3m3 ...+rn mn)/m1 +m2 +m3..+mn
Ho usato un sistema di assi cartesiani x e y, sui cui ho disegnato due masse giacenti sull'asse x.
Per trovare le coordinate del punto xc (anch'esso giacente sull'asse x), sono partito dal fatto che il centro di massa è il punto in cui m1d1=m2d2, o anche m2d2-m1d1=0, come mostra la figura.
Il tutto è visto in un istante t, come se tutto fosse immobile.
A questo punto ho aggiunto un'altra massa, per verificare se le coordinate del centro di massa confermavano la formuletta iniziale...
Sembra proprio che la formuletta sia confermata, ma ho voluto vedere cosa accade usando anche le coordinate y di masse che non sono giacenti sull'asse x.
Ne segue che le coordinate spaziali (x; y e z) del centro di massa dovrebbero risultare:
C(x;y;z) = m1 (x1;y1;z1) + m2 (x2;y2;z2)... + mn (xn;yn;zn)/(m1+ m2...+ mn)
Se derivo tutto rispetto al tempo ottengo delle velocità, o meglio le sue tre componenti Vx; Vy e Vz (se il movimento avviene solo lungo un asse uso solo quella), del centro di massa e di tutti i corpi presenti..
Alla fine la formuletta che ho usato, l'ho giustificata così..
Paolo
CVD